- 软件



/中文/

/中文/

//

/中文/

/中文/

/中文/

/中文/

/简体中文/
/简体中文/

/中文/
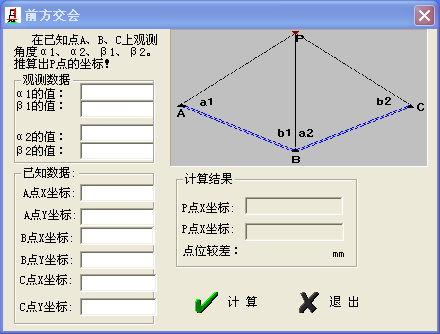
前方会一款利用三点得到第四点坐标的计算工具。其中需要观测数据(角度)和已知数据(坐标)来计算结果,是测绘学(一级学科)与工程测量(二级学科)所需应用的计算工具。
在已知A、B、C上观测角度a1、a2、b1、b2,推算出p点坐标。
观测数据:a1、a2、b1、b2
已知数据:A点X坐标、A点Y坐标、B点X坐标、B点Y坐标、C点X坐标、C点Y坐标
计算结果:P点X坐标、P点Y坐标
在两个已知点以上分别对待定点相互进行水平角观测,并根据已知点的坐标及观测角值计算出待定点坐标的方法。
设有A、B、P三点,A、B为已知坐标的点,P为未知点,用仪器测得∠PAB和∠PBA,根据A、B的坐标可求得P点的坐标,这种方法叫做前方交会
1.测量中什么叫前方交会和后方交会?
这是控制测量中的基本测量方法,用经纬仪。现在一般很少用了。大概意思是这样的:前交是用经纬仪在不同地点(都是已知坐标的)照准同一目标,当然国家规范上对角度和距离都有一定的限制,用不同组坐标推算目标坐标,还要检核。后交是经纬仪架在未知点上,向已知坐标点照准,计算方法相似。
2.全站仪的前方交会法和后方交会法分别应用于什么不同情况下?
一般用于几个控制点不能通视的情况下。以前也采用这两种方法做控制,加密控制点。前方交回和后方交回用的控制点个数不一样的。
3.怎么用全站仪前方交会,需要用棱镜照准么?
首先必须要有至少2个控制点(假如分别为A,B),在A上架设仪器对中整平,瞄准B后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠BAP,然后将仪器搬至B上架设仪器对中整,瞄准A后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠ABP.(这样计算只有平面坐标,如果需要高程值话还需要量取仪器高,棱镜高,同时还要测量竖直角)。
 蘑菇云手机精灵下载v1.2.322 官方版其他应用 / 3.2M
蘑菇云手机精灵下载v1.2.322 官方版其他应用 / 3.2M AutoCAD 2019注册机附序列号其他应用 / 2.0M
AutoCAD 2019注册机附序列号其他应用 / 2.0M Suapp pro中文版v3.5.1.3 最新版其他应用 / 6.9M
Suapp pro中文版v3.5.1.3 最新版其他应用 / 6.9M 小巧票据打印管理软件3.1 最新版其他应用 / 28.3M
小巧票据打印管理软件3.1 最新版其他应用 / 28.3M 福建联通好莱坞会员领取软件(腾讯视频vip领取)v1.0 最新版其他应用 / 5.5M
福建联通好莱坞会员领取软件(腾讯视频vip领取)v1.0 最新版其他应用 / 5.5M mifare one卡操作程序v1.5 绿色中文版其他应用 / 280KB
mifare one卡操作程序v1.5 绿色中文版其他应用 / 280KB Axure RP10授权密钥v10.0.0 最新版其他应用 / 91KB
Axure RP10授权密钥v10.0.0 最新版其他应用 / 91KB 谷歌云端语音识别工具下载正式版其他应用 / 2KB
谷歌云端语音识别工具下载正式版其他应用 / 2KB 3dmax2021注册机(附激活教程)v1.0 最新版其他应用 / 62KB
3dmax2021注册机(附激活教程)v1.0 最新版其他应用 / 62KB Custom Resolution Utilityv1.0 免费版其他应用 / 555KB
Custom Resolution Utilityv1.0 免费版其他应用 / 555KB 超大的wpa2破解字典其他应用 / 75.1MAxure RP10授权密钥v10.0.0 最新版其他应用 / 91KB3dmax2021注册机(附激活教程)v1.0 最新版其他应用 / 62KBCustom Resolution Utilityv1.0 免费版其他应用 / 555KB
超大的wpa2破解字典其他应用 / 75.1MAxure RP10授权密钥v10.0.0 最新版其他应用 / 91KB3dmax2021注册机(附激活教程)v1.0 最新版其他应用 / 62KBCustom Resolution Utilityv1.0 免费版其他应用 / 555KB win10注册表清理修复工具下载5.18 免费版其他应用 / 10.5Mmifare one卡操作程序v1.5 绿色中文版其他应用 / 280KB
win10注册表清理修复工具下载5.18 免费版其他应用 / 10.5Mmifare one卡操作程序v1.5 绿色中文版其他应用 / 280KB 微信dat文件解码工具v1.0 免费版其他应用 / 58.4M蘑菇云手机精灵下载v1.2.322 官方版其他应用 / 3.2MSuapp pro中文版v3.5.1.3 最新版其他应用 / 6.9M
微信dat文件解码工具v1.0 免费版其他应用 / 58.4M蘑菇云手机精灵下载v1.2.322 官方版其他应用 / 3.2MSuapp pro中文版v3.5.1.3 最新版其他应用 / 6.9M AI脚本插件合集(75款)v7.5 最新版其他应用 / 2.8M
AI脚本插件合集(75款)v7.5 最新版其他应用 / 2.8M QQ游戏大厅2022官方下载正式版v5.41.57773.0 最新版
QQ游戏大厅2022官方下载正式版v5.41.57773.0 最新版 腾讯QQ下载v9.5.9 最新版
腾讯QQ下载v9.5.9 最新版 QQ电脑管家v15.0.22206.230 最新正式版
QQ电脑管家v15.0.22206.230 最新正式版 雷神模拟器精简工具v1.0 绿色版
雷神模拟器精简工具v1.0 绿色版 企业微信电脑版v4.0.6.6516 官方PC版
企业微信电脑版v4.0.6.6516 官方PC版 美图秀秀电脑版v6.5.5.0 官方版
美图秀秀电脑版v6.5.5.0 官方版 360游戏大厅电脑版v6.0.0.1052 最新版
360游戏大厅电脑版v6.0.0.1052 最新版 迅雷11v11.3.9.1902 官方版
迅雷11v11.3.9.1902 官方版 芒果TV客户端v6.5.5.0 官方版
芒果TV客户端v6.5.5.0 官方版 网易云音乐pc客户端v2.9.8 官方版
网易云音乐pc客户端v2.9.8 官方版







 Xilisoft DVD Ripper Platinum(DVD复制工具)v7.8.23 中文版中文 / 41.9M
Xilisoft DVD Ripper Platinum(DVD复制工具)v7.8.23 中文版中文 / 41.9M 网易云音乐wp版下载v1.5.0 官方正式版中文 / 7.4M
网易云音乐wp版下载v1.5.0 官方正式版中文 / 7.4M 万能程序多开器电脑版下载v1.1 免费版中文 / 310KB
万能程序多开器电脑版下载v1.1 免费版中文 / 310KB 资产评估表格系统v2.0 官方版中文 / 3.2M
资产评估表格系统v2.0 官方版中文 / 3.2M 亲淘下载1.90.04U 官方版中文 / 38.3M
亲淘下载1.90.04U 官方版中文 / 38.3M WPS Office 2022 PC版v11.1.0.11636 官方最新版办公软件
WPS Office 2022 PC版v11.1.0.11636 官方最新版办公软件 搜狗拼音输入法电脑版v11.9.0.5784 官方正式版输入法类
搜狗拼音输入法电脑版v11.9.0.5784 官方正式版输入法类 京东读书电脑版v1.11.0.0 官方版阅读器类
京东读书电脑版v1.11.0.0 官方版阅读器类 手心输入法下载安装v3.1.0.1010 官方版输入法类
手心输入法下载安装v3.1.0.1010 官方版输入法类 搜狗五笔输入法电脑版安装包v5.4.0.2508 官方电脑版输入法类
搜狗五笔输入法电脑版安装包v5.4.0.2508 官方电脑版输入法类 钉钉电脑版v6.3.15.50078 官方版办公软件
钉钉电脑版v6.3.15.50078 官方版办公软件 360手机助手电脑版v3.0.0.1124 正式版安装包手机软件
360手机助手电脑版v3.0.0.1124 正式版安装包手机软件 WinRARv6.2.0.0 官方版(32位)压缩解压
WinRARv6.2.0.0 官方版(32位)压缩解压 有道云笔记电脑版v6.10.1.0 官方版办公软件
有道云笔记电脑版v6.10.1.0 官方版办公软件 鄂公网安备 42011102000260号
鄂公网安备 42011102000260号