- 软件



/中文/

/中文/

/中文/

/中文/

/中文/

/中文/

/中文/
/中文/

/中文/
/中文/
WinAutomation是一款非常好用的电脑自动操作软件,支持格式化自动填入表单信息,能够移动应用程序、调整窗口大小,能够录制宏功能,支持自定义鼠标键盘拟人化自动操作,有需要的用户赶快来下载吧!
一、您可以使用WinAutomation自动执行一些任务
1、使用本地文件中的数据自动填写和提交网页表单
2、检索并解析您的电子邮件,并使用电子邮件中包含的数据更新数据库
3、启动应用程序,移动,调整大小,关闭和操作窗口,截取屏幕截图
4、将您的任务转换为您自己的应用程序,只需按下一个按钮即可与其他人共享
5、收集网站并从任何网页提取数据到Excel或文本文件
6、以任何可能的方式复制,移动,编辑,重命名,压缩,解压缩和操作文件和文件夹
7、读取和写入数据到Excel文件,连接到SQL数据库和操纵文本文件
8、使用内置调度程序运行任何任务,按热键时,创建或删除文件时,当您的站点关闭或收到电子邮件时
9、将预先记录的鼠标点击和键击发送到任何桌面应用程序
10、自动化您的FTP传输:按计划下载和上传文件或整个文件夹
11、包含逻辑来自动执行最复杂的任务。
12、结合以上所有设计自定义任务以满足您的特定需求。
二、宏录像机
执行您希望在屏幕上自动执行的任务,然后宏记录器将其转换为一系列操作,可以随意多次重复。录制后,您可以使用Job Designer进一步自定义宏。
三、网页自动化
只需浏览您最喜欢的网页部分,然后收集数据,填写表格,下载文件 - 完成您通常在网上做的所有事情,Web Recorder将它们转换为您可以在需要时运行的宏。
四、可视工作设计师
可视化作业编辑器可以让你摆弄自动化,而不是玩一堆玩具砖。
五、任务计划程序
内置的任务计划程序允许您根据您选择的时间范围自动执行任何任务。通过从日程表菜单中的不同选项中进行选择,将您的任务设置为在需要时完成。
六、键盘宏
自从他们成为个人计算机以来,键盘一直是我们计算机中绑定的硬件中保存时间最长的硬件,所以我们现在是时候给他们一个“转折点”的转折点。队列键盘宏自动化。
七、系统监视
系统监控允许您根据您选择的事件自动执行任何任务。通过选择触发菜单中的任何不同选项,将您的任务设置为在需要时正好运行。
八、UI设计器
内置的UI设计器会在对话窗口添加一些闪光。每当你的工作需要一些用户输入时,用户不再会被同样无聊的灰色对话所欢迎 - 你唯一的限制就是你的CSS专家级别,所以开始自定义!
1、可视化机器人编辑器,可让您使用拖放来构建自动化机器人。
2、200多个预定义操作组合起来,便于机器人构建。
3、宏记录器,可让您记录用户交互以轻松自动执行任务。
4、UI自动化技术,允许直接处理窗口内的不同控件。
5、网络记录器,可让您在浏览网页并将其转换为机器人时记录您的活动。
6、任务计划程序,可让您在离开时安排和执行机器人。
7、触发器,用于监视系统并响应事件(例如,创建或修改文件,按热键,系统空闲时等)。
8、集成调试器在运行时检查和调试您的任务。
9、支持变量和数据类型。
10、运行机器人时自动登录解锁/登录到工作站。
11、高级流量控制功能,条件,循环,嵌套循环和函数。
12、高级错误处理,以创建机器人,以优雅地弥补和处理错误。
13、图像识别技术,能够“看到屏幕”,帮助您通过远程会话自动化非标准接口或应用程序。
14、机器人编译器(仅限专业版),用于将您的任务编译为自主的exe文件,您可以在未安装WinAutomation的情况下分发和运行它们。
15、控制库用于存储机器人的所有可访问控件和高级编辑。
16、实时机器人状态监测。
17、能够在运行中更改变量值的动态调试。
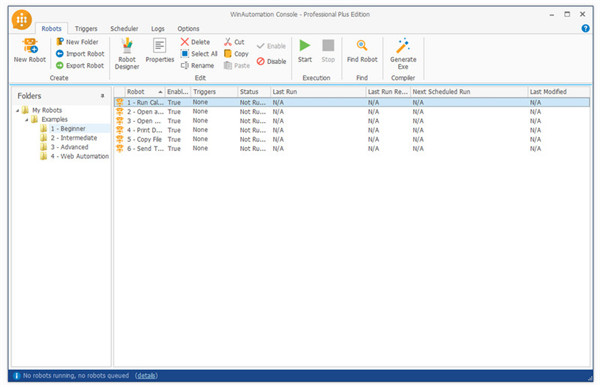
创建一个简单的机器人
1、创建文件夹并将其命名为TestFolder;张贴消息以表明它已完成。所以第一步是创建机器人。点击新机器人:
2、为新机器人的名称输入“新建文件夹”。点击“机器人设计器”图标,在设计器窗口中打开新的机器人并开始构建它。
3、分两步写出实际的机器人。首先,打开文件夹的操作类别,然后拖动操作创建文件夹并将其放到操作序列中。您也可以双击动作创建文件夹。
4、打开“创建文件夹”属性窗口,并在字段中输入位置(C:\)和名称(“TestFolder”)。
5、不需要稍后存储文件夹,因此现在忽略Action输出。按“确定”,并关闭属性窗口。
第二步,打开消息框的操作类别并拖放操作显示消息。
1、在该属性窗口中,输入标题(“我的第一个机器人”)和消息(“文件夹”TestFolder“已创建!”),然后关闭该框。
2、从机器人设计器窗口运行机器人,确保一切按预期工作。随着机器人运行,窗户会发生变化,然后出现一个消息框,其中“Folder”TestFolder“已创建!”。 C:\ TestFolder中还有一个新文件夹,所以机器人现在已经完成。
 鼠标模拟软件Axife Mouse Recorder6.0.2 破解版键盘鼠标 / 4.0M
鼠标模拟软件Axife Mouse Recorder6.0.2 破解版键盘鼠标 / 4.0M HellX局域网键鼠同步器v1.0 绿色版键盘鼠标 / 733KB
HellX局域网键鼠同步器v1.0 绿色版键盘鼠标 / 733KB 阿冲全能点击王v4.6.1 官方版键盘鼠标 / 2.4M
阿冲全能点击王v4.6.1 官方版键盘鼠标 / 2.4M 后台脚本工具乐玩版v21.4.3.2 免费版键盘鼠标 / 15.6M
后台脚本工具乐玩版v21.4.3.2 免费版键盘鼠标 / 15.6M 微软屏幕键盘v2.0 免费版键盘鼠标 / 327KB
微软屏幕键盘v2.0 免费版键盘鼠标 / 327KB 键盘鼠标录制回放器v1.2.0 绿色版键盘鼠标 / 535KB
键盘鼠标录制回放器v1.2.0 绿色版键盘鼠标 / 535KB 华华鼠标自动点击器v6.4免费版v6.4 吾爱版键盘鼠标 / 393KB
华华鼠标自动点击器v6.4免费版v6.4 吾爱版键盘鼠标 / 393KB Hot Key万能血雾压枪v1.0 免费版键盘鼠标 / 2.3M
Hot Key万能血雾压枪v1.0 免费版键盘鼠标 / 2.3M 简单鼠标宏编辑工具v18.09.19 官方版键盘鼠标 / 989KB
简单鼠标宏编辑工具v18.09.19 官方版键盘鼠标 / 989KB 虚拟手柄映射工具vjoy devicev2.1.9.1 官方版键盘鼠标 / 20.1M鼠标模拟软件Axife Mouse Recorder6.0.2 破解版键盘鼠标 / 4.0MHellX局域网键鼠同步器v1.0 绿色版键盘鼠标 / 733KB阿冲全能点击王v4.6.1 官方版键盘鼠标 / 2.4M后台脚本工具乐玩版v21.4.3.2 免费版键盘鼠标 / 15.6M微软屏幕键盘v2.0 免费版键盘鼠标 / 327KB键盘鼠标录制回放器v1.2.0 绿色版键盘鼠标 / 535KB简单鼠标宏编辑工具v18.09.19 官方版键盘鼠标 / 989KBHot Key万能血雾压枪v1.0 免费版键盘鼠标 / 2.3M华华鼠标自动点击器v6.4免费版v6.4 吾爱版键盘鼠标 / 393KB虚拟手柄映射工具vjoy devicev2.1.9.1 官方版键盘鼠标 / 20.1M
虚拟手柄映射工具vjoy devicev2.1.9.1 官方版键盘鼠标 / 20.1M鼠标模拟软件Axife Mouse Recorder6.0.2 破解版键盘鼠标 / 4.0MHellX局域网键鼠同步器v1.0 绿色版键盘鼠标 / 733KB阿冲全能点击王v4.6.1 官方版键盘鼠标 / 2.4M后台脚本工具乐玩版v21.4.3.2 免费版键盘鼠标 / 15.6M微软屏幕键盘v2.0 免费版键盘鼠标 / 327KB键盘鼠标录制回放器v1.2.0 绿色版键盘鼠标 / 535KB简单鼠标宏编辑工具v18.09.19 官方版键盘鼠标 / 989KBHot Key万能血雾压枪v1.0 免费版键盘鼠标 / 2.3M华华鼠标自动点击器v6.4免费版v6.4 吾爱版键盘鼠标 / 393KB虚拟手柄映射工具vjoy devicev2.1.9.1 官方版键盘鼠标 / 20.1M 腾讯QQ下载v9.7.22.29298 最新版
腾讯QQ下载v9.7.22.29298 最新版 QQ游戏大厅2023官方下载正式版v5.47.57938.0 最新版
QQ游戏大厅2023官方下载正式版v5.47.57938.0 最新版 QQ电脑管家v15.0.22206.230 最新正式版
QQ电脑管家v15.0.22206.230 最新正式版 雷神模拟器精简工具v1.0 绿色版
雷神模拟器精简工具v1.0 绿色版 迅雷影音下载v6.2.6.622 PC版
迅雷影音下载v6.2.6.622 PC版 Google Chrome浏览器v119.0.6045.105 官方中文版
Google Chrome浏览器v119.0.6045.105 官方中文版 迅雷11正式版客户端v12.0.1.2184 官方版
迅雷11正式版客户端v12.0.1.2184 官方版 爱思助手PC版v7.98.77 官方最新版
爱思助手PC版v7.98.77 官方最新版 快剪辑电脑版v1.2.9.4001 官方版
快剪辑电脑版v1.2.9.4001 官方版 爱奇艺PC版客户端下载v10.8.5.7283 官方电脑版
爱奇艺PC版客户端下载v10.8.5.7283 官方电脑版





 usb游戏手柄模拟器v5.9.0.390 免费版中文 / 908KB
usb游戏手柄模拟器v5.9.0.390 免费版中文 / 908KB 无敌点击狗软件免费版v8.1 最新版中文 / 4.2M
无敌点击狗软件免费版v8.1 最新版中文 / 4.2M 简单百宝箱键盘鼠标录制精灵软件v4.0 绿色版中文 / 1.3M
简单百宝箱键盘鼠标录制精灵软件v4.0 绿色版中文 / 1.3M 葡萄键鼠pc激活器v1.3.0 官方版中文 / 1.4M
葡萄键鼠pc激活器v1.3.0 官方版中文 / 1.4M 360手机助手电脑版v3.0.1.1141 正式版安装包手机软件
360手机助手电脑版v3.0.1.1141 正式版安装包手机软件 搜狗拼音输入法电脑版v13.7.0.7991 官方正式版输入法类
搜狗拼音输入法电脑版v13.7.0.7991 官方正式版输入法类 有道云笔记电脑版v7.2.7.0 官方版办公软件
有道云笔记电脑版v7.2.7.0 官方版办公软件 WinRARv6.21.0.0 官方版(32位)压缩解压
WinRARv6.21.0.0 官方版(32位)压缩解压 钉钉电脑版下载官方pc客户端v7.0.20.41407 官方版办公软件
钉钉电脑版下载官方pc客户端v7.0.20.41407 官方版办公软件 京东读书电脑版v1.13.1.0 官方版阅读器类
京东读书电脑版v1.13.1.0 官方版阅读器类 搜狗五笔输入法电脑版安装包v5.5.0.2582 官方电脑版输入法类
搜狗五笔输入法电脑版安装包v5.5.0.2582 官方电脑版输入法类 WPS Office 2022 PC版v11.1.0.11875 官方最新版办公软件
WPS Office 2022 PC版v11.1.0.11875 官方最新版办公软件 手心输入法下载安装v3.1.0.1010 官方版输入法类
手心输入法下载安装v3.1.0.1010 官方版输入法类 鄂公网安备 42011102000260号
鄂公网安备 42011102000260号